- Jste zde:
- Úvodní stránka »
- Odborné články »
- Pojízdné laboratoře k výzkumu Sluneční soustavy - plány
Pojízdné laboratoře k výzkumu Sluneční soustavy - plány
Plány a návrhy pro nejbližší období
Mars Science Laboratory
Chandrayaan-1 a 2
Dočkáme se čínského Lunochodu?
ExoMars
Scarab – robot pro Měsíc
Nejlepší přítel kosmonautů
Člun k výzkumu Titanu
Skákadlo pro kometu?
Bude japonský robot kráčet po Měsíci?
Mars Science Laboratory
Ve výzkumu planety Mars bude pokračovat americká pojízdná laboratoř MSL (Mars Science Laboratory), jejíž start byl naplánován na startovní okno v období 15. 9. až 4. 10. 2009. Přistání na povrchu rudé planety se mělo uskutečnit v termínu mezi 10. červencem až 14. zářím 2010. Vzhledem k finančním a technickým problémům byl start odložen na další startovní okno a uskutečnil se 26. listopadu 2011. Na Marsu by měla pojízdná laboratoř přistát 5. 8. 2012.
Začátkem srpna 2008 byly zahájeny zkoušky podvozku laboratoře. Práce na vývoji MSL probíhaly v Jet Propulsion Laboratory (JPL). MSL bude prvním robotem, který přistane na povrchu Marsu rovnou na „vlastní nohy“ – na všech šest kol. Nebude potřebovat airbagy ani žádné zdlouhavé přípravné procedury před zahájením výzkumu. „MSL bude vysazena na povrchu Marsu pomocí létajícího jeřábu a téměř okamžitě bude připravena do akce,“ říká Brian Muirhead, hlavní inženýr JPL pro projekt MSL.
Létající kosmický jeřáb (Sky Crane) ponese nádrže s pohonnými látkami a po stranách také dva výložníky, opatřené raketovými motory. Takováto souprava s řiditelnými motory zajistí přistání na povrchu planety. Za použití řídící a navigační aparatury se sonda bude vznášet nad povrchem planety po dobu několika sekund. Přitom dojde ve výšce 5 m k oddělení MSL a k jejímu spuštění pomocí lan na povrch Marsu. Poté, co se vědecká laboratoř dotkne povrchu planety, budou pyrotechnicky oddělena nosná lana, doposud ji poutající k plošině s raketovými motory. Plošina pak odletí o několik set metrů stranou, kde dopadne na povrch Marsu.
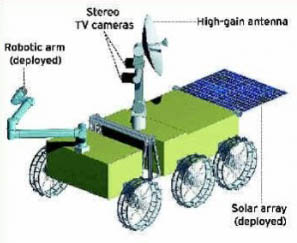
V přední části pojízdné laboratoře bude umístěn manipulátor, který ponese některé přístroje k odběru vzorků kamene či horniny k další analýze. V blízkosti základny manipulátoru je systém přípravy vzorků a manipulace se vzorky, určený k jejich rozemletí a k distribuci do vědeckých analyzátorů.

[1] Přistání laboratoře Curiosity na povrchu Marsu – kresba
Stožár, vystupující 2,1 m nad úroveň terénu, ponese přístroje pro zajištění orientace: barevnou stereo kameru pro pořizování snímků okolního terénu a materiálu, odebíraného pomocí manipulátoru, a dále zařízení k analýze atomů, uvolněných z horniny působením laserového impulsu, kdy dojde k odpaření povrchové vrstvy. Zařízení má dosah zhruba 13 m. Infračervený laser, pracující se zářením o vlnové délce 1067 nm, bude vysílat pulsy v trvání 5 nanosekund, čímž bude na zkoumaný objekt krátkodobě soustředěna energie 1 GW/cm2.
Dvojice kamer pro stereo snímky bude schopna pořizovat fotografie objektů ve vzdálenosti větší než 1 km s rozlišením 10 cm/pixel. Další kamera bude umístěna na robotickém manipulátoru a bude schopná pořizovat mikroskopické snímky kamenů či horniny s rozlišením 12,5 mikrometru.
MSL se bude pohybovat rychlostí až 90 m/h a bude schopná překonat překážky o výšce až 75 cm. Energii jí budou dodávat dva jaderné generátory. I to představuje proti doposud používaným slunečním bateriím pokrok, protože sonda nebude závislá na střídání dne a noci, na snižování výkonu při zaprášení povrchu slunečních panelů a vlastním „stárnutím“ slunečních článků. Plánovaná životnost pojízdné laboratoře je jeden marťanský rok (tj. asi 686 pozemských dnů).
Hmotnost laboratoře MSL v ceně asi 2,5 miliardy dolarů se bude pohybovat kolem 850 kg, z toho asi 65 kg připadne na vědecké vybavení. Analýzu hornin bude provádět 8 přístrojů.
S přistáním Mars Science Laboratory se uvažovalo na jednom ze čtyř míst, vybraných z více než 50 předběžně navrhovaných oblastí. Jedná se o: kráter Holden, kráter Gale, oblast Mawrth Vallis a kráter Eberswalde. Definitivní výběr přistávací oblasti bude proveden později na základě dalších průzkumů z oběžné dráhy. Vědci zapojení do vybírání těchto míst prohlásili, že zvolené oblasti představují místa budící přesvědčení, že tady by pojízdná laboratoř mohla významně přispět k rozšíření našich znalostí týkajících se podmínek na Marsu a možnosti jeho obyvatelnosti. Pojízdná laboratoř MSL přistane v oblasti kráteru Gale, 4,5° jižně od rovníku.
Pojízdný robot Mars Science Laboratory byl pojmenován Curiosity.

[2] Vzhled laboratoře Curiosity - kresba
Chandrayaan-1 a 2
Do výzkumu Měsíce se zapojila také Indie. Indičtí vědci o tom hovoří již od roku 2001. Jejich první měsíční sonda s názvem Chandrayaan-1 byla vypuštěna 22. 10. 2008. Úkolem sondy byla prověrka vybavení a technologických prvků, ale také výzkum Měsíce. Jejím hlavním úkolem bylo pořízení mapy chemického složení povrchu Měsíce, a dále sestavení plastické mapy nejzajímavějších oblastí, které měly být zkoumány s vysokým rozlišením v oboru viditelného, infračerveného a rentgenového záření.
Start byl realizován pomocí indické nosné rakety PSLV (Polar Satellite Launch Vehicle). Po letu trvajícím 5,5 dne byla sonda Chandrayaan-1 navedena na oběžnou dráhu kolem Měsíce. Vědecké vybavení sondy představuje 11 přístrojů. Na jejich vývoji se kromě indických vědců (6 přístrojů) podíleli odborníci z USA, Velké Británie, Švédska, Německa a Bulharska. Předpokládaná životnost sondy je dva roky.
[3] Měsíční vozítko Chandrayaan-2
Od sondy Chandrayaan-1 se na oběžné dráze ve výšce 100 km nad povrchem oddělil malý modul MIP (Moon Impact Probe) o hmotnosti 29 kg a rozměrech 375 x 375 x 470 mm. Jeho úkolem bylo uskutečnit náraz do měsíčního povrchu. Vyvržené částice byly studovány přístroji na orbitální sondě a určovány jejich vlastnosti. Na palubě modulu se nacházely tři hlavní vědecké přístroje, které fungovaly během přibližování k povrchu Měsíce: radarový výškoměr, videokamera a hmotový spektrometr. Hmotový spektrometr během pádu, trvajícího 18 minut, rovněž studoval složení částic v blízkosti Měsíce.
Hovoří se také o následující sondě Chandrayaan-2, která měla být vypuštěna v roce 2011, nyní se hovoří nejdříve o roce 2014. Bude se jednat o mnohem ambicióznější let. Na projektu budou rovněž spolupracovat i zahraniční partneři. Sonda bude nejprve navedena na parkovací oběžnou dráhu kolem Země ve vzdálenosti 180 až 24 000 km, posléze na přeletovou translunární dráhu směrem k Měsíci. Orbitální část bude provádět výzkum Měsíce z oběžné dráhy. Přistávací část sondy dopraví na povrch Měsíce ruské pojízdné vozítko o hmotnosti 30 až 100 kg. Dohoda o tom byla podepsána v listopadu 2007. Jeho hmotnost bude záviset na zvoleném způsobu přistání. Životnost vozítka má být jeden měsíc, elektrickou energii mu budou dodávat panely slunečních baterií. Pro zajištění delší životnosti musí být vozítko vybaveno bateriemi vzhledem dlouhotrvající měsíční noci. Vozítko se bude pohybovat po povrchu Měsíce, odebírat vzorky horniny a provádět jejich analýzu. Přes družici na oběžné dráze bude data předávat na Zemi do řídícího střediska.
Celková startovní hmotnost sondy bude asi 2 650 kg, z toho na přistávací část připadne zhruba 1 250 kg. Kromě ruského pojízdného zařízení bude na povrch Měsíce dopraven i pojízdný robot indické výroby. Indický dvounohý robot SmartNav, který vyvíjí Indická kosmická agentura ISRO, bude vybaven důmyslnými senzory a kamerami s vysokým rozlišením.
Podle posledních informací se bude jednat pouze o sondu, která bude navedena na oběžnou dráhu kolem Měsíce. Ruské pojízdné vozítko bude na povrch Měsíce dopraveno v rámci projektu Luna-Glob 2 (start: 2014) společně s indickou družicí – vypuštění se uskuteční pomocí indické rakety GSLV. Ruské vozítko by mělo přistát v oblasti jižního pólu Měsíce. Šestikolový robot napájený pomocí slunečních baterií by měl během jednoho roku překonat vzdálenost asi 150 km. Robot SmartNav bude vypuštěn při některé z dalších misí k Měsíci.
Vzhledem k tomu, že popisované sondy využívají některé komponenty neuspěšné ruské sondy Fobos-Grunt, je více než pravděpodobné, že jejich realizace bude mít zpoždění.
[4] Ruský lunochod Luna-Glob 2 u jižního pólu Měsíce
Dočkáme se čínského Lunochodu?
Rovněž Čína, která vypustila velké množství umělých družic na oběžnou dráhu kolem Země a která již 3krát dopravila své kosmonauty do vesmíru, má velkolepé plány i pro výzkum těles Sluneční soustavy, především Měsíce. Projekt byl pojmenován Chang´e. Je to jméno první ženy (bohyně), která podle starověkých čínských legend odletěla žít na Měsíc.
Čínský výzkum Měsíce lze rozdělit do několika etap. Do první etapy patří sonda Chang´e-1 o hmotnosti 2350 kg, která byla vypuštěna 24. 10. 2007 a úspěšně navedena na oběžnou dráhu kolem Měsíce, odkud prováděla jeho výzkum.

[5] Model čínského lunochodu
Ve druhé etapě (kolem roku 2013) bude na povrch Měsíce dopraven čínský pojízdný robot v rámci mise Chang´e-3. Prototyp autonomní pojízdné laboratoře Čína již představila veřejnosti. Konstrukční rychlost čínského lunochodu bude 100 metrů za hodinu. Zařízení bude vysoké 1,5 m a jeho hmotnost bude 120 kg včetně 20 kg vědeckých přístrojů. Bude se pohybovat na šesti nezávisle řízených kolech. Vědeckou aparaturu budou tvořit kamery za účelem pořizování trojrozměrných snímků okolního terénu, bude realizován přímý přenos videosnímků, nebude chybět aparatura k odběru vzorků měsíční horniny a jejich následné analýze. Automatický řídící systém umožní vozidlu pohyb po terénu se sklonem do 30° a překonávání překážek vysokých 25 cm.
Práce na vývoji čínského lunochodu úspěšně probíhají. Za největší problém je považováno zajištění energetických zdrojů laboratoře v období lunární noci, trvající 14 pozemských dnů. Poněvadž sluneční baterie v této době nemohou produkovat elektrickou energii, uvažuje se o tom, že na palubě laboratoře bude rovněž radioizotopový termoelektrický generátor.
Místo přistání bude pravděpodobně ležet v oblasti Sinus Iridium, na 44. stupni severní šířky.
Ve třetí etapě – pravděpodobně v roce 2017 – bude proveden odběr vzorků měsíční horniny, které budou dopraveny k detailnímu průzkumu do pozemních laboratoří. Pro další období se uvažuje o programu čínských pilotovaných letů na Měsíc.

[6] Model čínského lunochodu
ExoMars
Evropská kosmická agentura ESA zatím vyslala k Marsu jednu velmi úspěšnou sondu Mars Express (start 2. 6. 2003), která byla na oběžnou dráhu kolem rudé planety navedena 25. 12. 2003, odkud pořizuje velmi detailní snímky povrchu rudé planety. Poskytla mj. další důkazy o působení tekoucí vody v dávné historii Marsu.
Evropští vědci již delší dobu pracují na vývoji nové sondy s názvem ExoMars, jejímž úkolem bude dopravit na povrch Marsu pojízdnou vědeckou laboratoř Pasteur. Jejím hlavním úkolem bude hledání stop minulého a současného života, studium podpovrchových vrstev planety pomocí radaru se zaměřením na zjišťování přítomnosti ledu, určení stupně nebezpečí pro pilotované výpravy a výzkumy za účelem lepšího pochopení geologického vývoje planety.

[7] Připravovaný evropský marsochod Pasteur
Start sondy pomocí evropské nosné rakety Ariane 5 byl naplánován na listopad 2013, přistání na Marsu se očekávalo v září 2014. Podle novějších informací byl start odložen na rok 2016, současná situace je opět jiná. Než si přiblížíme současné plány, připomeňme si základní parametry dřívějšího návrhu.
Minimální životnost byla plánována na 6 měsíců. Pojízdný robot o hmotnosti kolem 150 kg měl být mj. vybaven speciální vrtnou soupravou, schopnou odebrat vzorky horniny z hloubky až 2 m. Lze předpokládat, že pod povrchem planety byl případný život lépe chráněn před kosmickým zářením. Robot se měl pohybovat na 6 kolech a předpokládalo se, že překoná vzdálenost několika km.
Stacionární sonda s názvem Humboldt měla být vybavena 11 přístroji o celkové hmotnosti 8,5 kg k výzkumu povrchu Marsu v místě přistání a k výzkumu atmosféry. Pojízdná laboratoř Pasteur měla disponovat 12 přístroji o hmotnosti 16,5 kg. Na vývoji sondy a na přípravě experimentů se podílelo celkem 535 vědců z 21 států. Evropská kosmická agentura ESA odhadovala cenu projektu zhruba na 850 miliónů euro.
Vozítko mělo být vybaveno mj. přístroji, schopnými detekovat i velmi nepatrné stopy biologických látek. Jedním z přístrojů měl být Sub Critical Water Extractor využívající vodu k extrahování organických molekul ze vzorku, odebraného pomocí vrtáku. Miniaturní seismometr zase měl registrovat i velmi slabá „marsotřesení“. Na přístrojovém vybavení se měla podílet i NASA.
V rámci finančních úspor byla nejprve zrušena stacionární sonda Humboldt k dlouhodobému výzkumu povrchu rudé planety a její atmosféry. Následně se ESA a NASA domluvily na spolupráci při výzkumu Marsu. Nejprve má být v roce 2016 realizována sonda s názvem ExoMars Trace Gas Orbiter, která bude planetu zkoumat z oběžné dráhy. Součástí této mise bude i zkušební přistávací modul Entry k prověrkám přistávací sekvence.
Teprve o dva roky později (2018) by měla startovat k Marsu pojízdná evropská laboratoř ExoMars o hmotnosti kolem 300 kg a menší americké vozítko (hmotnost 65 kg) s názvem Mars Astrobiology Explorer-Cacher (MAX-C). Jak ale celý projekt dopadne, není v tuto chvíli vůbec jasné. Americká NASA totiž omezila svůj finanční příspěvek na tento společný projekt s ESA.
Možná ale bude všechno ještě jinak. Předpokládá se, že rozpočet NASA bude na příští rok omezen, především na úkor projektů k bezpilotnímu výzkumu Sluneční soustavy. Jaký bude osud popsaných projektů, zatím není jasné. Je velmi pravděpodobné, že účast NASA bude zrušena. ESA již jedná o možné spolupráci s Ruskem.
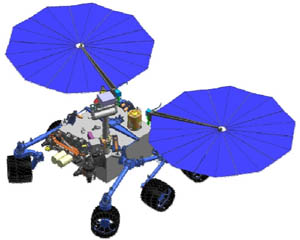
[8] Mars Astrobiology Explorer-Cacher (MAX-C)
Scarab – robot pro Měsíc
Kamenné svahy vyhaslé sopky Mauna Kea (Havajské ostrovy) posloužily jako cvičný polygon měsíčního terénu, na kterém vědci Carnegie Mellon Robotics Institute, NASA a dalších organizací prováděli zkoušky robota, určeného v budoucnu k průzkumu Měsíce.
V průběhu experimentů, které se uskutečnily v první polovině listopadu 2008, napodoboval robot nazvaný Scarab lunární misi. Prováděl extrahování vody, vodíku, kyslíku a dalších sloučenin, které mohou být potenciálně těženy na Měsíci za účelem využití při výstavbě stálé základny. Robot pohybující se na čtyřech kolech se přemísťoval, pomocí vrtáku odebíral vzorky horniny a prováděl jejich analýzu.

[9] Zkoušky měsíčního robota Scarab
„Lidé se nevrátí na povrch Měsíce k dlouhodobému pobytu, dokud nenajdeme surovinové zdroje, které usnadní jejich pobyt na Měsíci,“ říká profesor William Whittaker, ředitel Robotics Institute´s Field Robotics Center. „Technologie vyvíjené pro robota Scarab pomohou objevit jakékoliv zdroje vody, které můžeme využít pro novou etapu výzkumu Měsíce.“
Scarab byl navržen a postaven pro program NASA s názvem Human Robot System pracovníky Carnegie Mellon University. Poslouží pro pozemní zkoušky technologií, které by mohly být použity při konstrukci robota k výzkumu kráterů v oblasti měsíčního jižního pólu, kde robot bude operovat v prostředí věčné temnoty a za teplot kolem -230 °C. Bude vybaven laserovým zařízením pro „noční“ vidění. Robot neobvyklého vzhledu je vybaven výkyvnou nápravou, umožňující zdolávat písčitý terén či kamenité svahy, překonávat překážky a provádět odběr vzorků pomocí vrtné soupravy. Robot o rozměrech 165 x 90 cm a hmotnosti 400 kg bude spotřebovávat pouze malé množství energie kolem 100 W. Energii mu bude dodávat radioizotopový zdroj. Pohyb robota bude velmi pomalý – rychlostí přibližně 5 cm/s.
Scarab je vybaven vrtnou soupravou, vyrobenou ve společnosti Norcat (Northern Centre for Advanced Technology Inc.) v Sudbury, Ontario, Kanada. Vrták odebere během několika hodin souvislý vzorek horniny do hloubky 1 m z pevné vrstvy či zvětralého kamene. Odebraný vzorek bude následně přemístěn do dalšího zařízení, vyrobeného firmou Norcat, které jej rozdrtí na drobné úlomky.
Rozdrcený kámen a hornina spadne do zařízení RESOLVE (Regolith and Environment Science and Oxygen and Lunar Volatile Extraction), což je experiment, vyvinutý NASA v rámci programu ISRU (In Situ Resource Utilization). Uvnitř zařízení RESOLVE je komora, v níž je vzorek horniny zahříván na teplotu až 900 °C. Přitom se uvolňují plyny, které jsou transportovány do plynového chromatografu, což je zařízení, které rozpoznává jednotlivé chemické látky a jejich poměrné zastoupení, a také určuje přesné složení sloučenin, které nás zajímají. Analýza celého vzorku v délce jednoho metru bude trvat asi 20 hodin. Zkušební cvičný terén NASA se nachází ve výšce přibližně 2 700 m n. m.
O vyslání robota typu Scarab na Měsíc zatím nebylo rozhodnuto.

[10] Zkoušky měsíčního robota Scarab
Nejlepší přítel kosmonautů
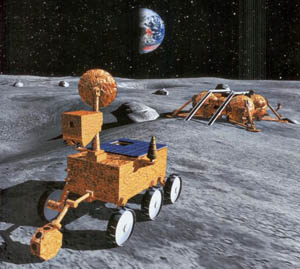
Vědci z kosmického střediska Johnson Space Center (NASA) v Houstonu uskutečnili v poušti Utah zkoušky robota, který může astronautům sloužit jako dobře vycvičený pes. Například může doprovázet kosmonauty putující „vycházkovým tempem“ po povrchu Marsu, může nosit odebrané vzorky či vědecké přístroje. Může se tedy stát nejlepším „přítelem“ kosmonautů při průzkumu těles Sluneční soustavy.
Pojízdný robot na 4 kolech s oficiálním názvem ERA (Extra-Vehicular Activity Robotic Assistant) a s přezdívkou Boudreaux připomíná svými rozměry golfový vozík a svým vzhledem americké marsochody Spirit a Opportunity, kteří nyní pracují na rudé planetě.
Robot je téměř zcela autonomní, je schopen na základě zjištěných údajů naplánovat svoji vlastní trasu dalšího postupu, reaguje na hlasové povely kosmonautů a pokorně se pohybuje tam, kde pracují. Může také hlásit svým „páníčkům“, kde se právě nacházejí. Robot je vybaven stereoskopickými kamerami, aby mohl předávat do řídícího střediska snímky okolní krajiny včetně polohy kosmonautů. Robotizovaný „pes“ má celou řadu výhod ve srovnání se svými kolegy-kosmonauty. Boudreaux je například vybaven velice obratnou „rukou“, pomocí níž může odebírat vzorky horniny nebo kosmonautům podávat přístroje, které jim upadnou na povrch planety. To není pro kosmonauty zrovna jednoduchý úkon vzhledem k tomu, že budou oblečeni do těžkých skafandrů.
Výrobci robota ERA jsou přesvědčeni, že se uplatní především při výzkumu Měsíce a Marsu. Nelze ani vyloučit, že bude vypuštěn na některá tělesa Sluneční soustavy ještě dříve, než se tam vydá člověk.

[11] Robot – nejlepší přítel kosmonauta
Člun k výzkumu Titanu
Doposud žádná pozemská loďka neplula po moři na jiné planetě. NASA nyní zvažuje takovýto projekt k výzkumu Saturnova ledového měsíce Titan. Průzkum jezer tvořených kapalnými uhlovodíky může být klíčem k objasnění klimatických změn na měsíci a možná poskytne informace o místních exotických formách života.
Povrch měsíce Titan je doslova poset jezery, čímž poněkud připomíná Zemi. Avšak místo vody jsou tato jezera zaplněna směsí kapalného etanu a metanu, které se na Zemi vyskytují v plynném stavu. Ale na Titanu při teplotě -180 °C existují v kapalném stavu.
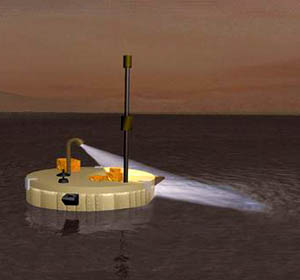
NASA nyní zvažuje vyslání kosmické sondy, která by přistála přímo na hladině některého jezera. Pokud bude vybrána k realizaci mise s názvem TiME (Titan Mare Explorer), jeden ze tří finálních projektů vybraných z velkého počtu přihlášených návrhů, start by se mohl uskutečnit v roce 2016. Vedoucí projektu je Ellen Stofan, Proxemy Research, Gaithersburg, Maryland.

[12] Meziplanetární modul sondy TiME
V roce 2023, po sedm let trvající cestě vesmírem, se sonda TiME snese na padácích a přistane na hladině jezera s názvem Ligeia Mare, které se nachází na severní polokouli největšího Saturnova měsíce Titan. Energii bude dodávat teplo uvolňované při radioaktivním rozpadu plutonia na palubě sondy. Tento člun se bude houpat na vlnách jezera a plout po jeho hladině, přičemž po dobu tří měsíců bude provádět nejrůznější vědecká měření.
Titan je jediným místem ve Sluneční soustavě, kde s největší pravděpodobností existuje analogický cyklus jako je koloběh vody v přírodě na naší Zemi, jen s tím rozdílem, že místo vody cirkulují kapalné uhlovodíky: v podobě deště kapky uhlovodíků dopadají na povrch měsíce, v podobě potoků a řek se stékají a vytvářejí jezera a moře, následuje proces vypařování, tvorba oblačnosti, déšť a vše se opakuje neustále dokola.
Kosmická sonda TiME by mohla pomoci odhalit základní informace o tomto cyklu na základě měření teploty, vlhkosti a rychlosti větru nad hladinou jezera. Pokud bude mít štěstí, může se stát první sondou, která „na vlastní kůži“ zažije působení deště na jiném kosmickém tělese, než je Země. Sonda bude rovněž pořizovat fotografie povrchu jezera (jeho „vodní“ hladiny) a pobřežních linií, případně oblačnosti na místní obloze.
Protože nebude vybavena žádným pohonným zařízením, měla by být tato sonda ve tvaru „létajícího talíře“ poháněna působením větru, což jí umožní odebírat vzorky na různých místech zkoumaného jezera. Pokud vše půjde podle předpokladu, bude rovněž měřit hloubku jezera pomocí sonaru a pomocí hmotového spektrometru zjišťovat chemické složení vzorků kapaliny.
Tyto výzkumné metody mohou poskytnout nové okno ke studiu zajímavých chemických procesů na povrchu a v atmosféře Titanu. Komplex organických sloučenin na bázi uhlíku, jako je například acetylén, jak již bylo zjištěno, vzniká v hojném množství v atmosféře měsíce a v podobě deště dopadá na povrch.
Organické molekuly byly pravděpodobně přimíchány do kapalin v jezerech a mohly by zde prodělat další chemické reakce. Někteří vědci předpokládají, že tato jezera by mohly obývat mikroskopické formy života, krmit se acetylénem a vylučovat (vydechovat) plynný vodík.
Pomocí hmotového spektrometru bude sonda TiME studovat různé zajímavé chemické procesy, probíhající v jezeře. Pokud je zde přítomen nějaký život, mohl by produkovat neobvyklé sloučeniny v přítomném množství organických molekul.
„Titan je koncovým bodem výzkumu, kde jsou hranice života ve Sluneční soustavě,“ říká Ellen Stofan. „Budeme hledat neobvyklé zákonitosti v množství přítomných sloučenin, abychom objevili důkazy komplikovaných či zajímavých chemických reakcí.“
Avšak aby mohla tato sonda odstartovat k Titanu, musí porazit další dva soupeře v podobě navrhovaných projektů, a to seismickou monitorovací stanici k výzkumu podpovrchových vrstev planety Mars, a také návrh sondy v podobě jakéhosi „skákadla“ k výzkumu povrchu kometárního jádra.
NASA nedávno uvolnila 3 milióny dolarů na rozpracování každého ze tří vybraných návrhů. Po zhodnocení jednotlivých projektů bude v roce 2012 vybrán vítězný návrh. Náklady na realizaci kosmické sondy by neměly přesáhnout částku 425 miliónů dolarů.
[13] Předběžná představa mise TiME
Skákadlo pro kometu?
Komise NASA a dalších vědeckých pracovníků a techniků posoudila 28 návrhů kosmických sond k výzkumu těles Sluneční soustavy a vybrala tři vítězné koncepty, mezi nimi i misi Comet Hopper, k dalšímu rozpracování. V roce 2012 budou všechny tři projekty znovu posouzeny a jeden z nich bude vybrán k realizaci v roce 2016. Finanční náklady na realizaci mise (kromě startu) by neměly přesáhnout částku 425 miliónů dolarů.
Hlavním vedoucím projektu je astronomka Jessica Sunshine z University of Maryland. Členy týmu jsou i další vědečtí pracovníci univerzity včetně Michaela A´Hearna, který byl vedoucím týmu při realizaci sondy Deep Impact a následné mise EPOXI. Na realizaci projektu Comet Hopper se budou podílet Goddard Space Flight Center in Greenbelt, Lockheed Martin, KinetX, Johns Hopkins University Applied Physics Laboratory, University of Bern, Jet Propulsion Laboratory a Discovery Communications.
„Doposud jsme realizovali některé úžasné průlety v blízkosti komet, které však byly určeny pouze k pořízení momentek ze života komety, ke zjištění, jak kometa vypadá v době průletu sondy,“ říká Jessica Sunshine. „Komety jsou velmi zajímavé, protože jsou dynamické, dochází u nich k proměnám během oběhu kolem Slunce. S touto novou misí se hodláme postupně přiblížit k jádru komety, dosáhnout její oběžné dráhy a průběžně sledovat její aktivitu, jak se pomalu probouzí k životu, když se přibližuje ke Slunci stále blíž a blíž.“
Kosmická sonda Comet Hopper bude mít za úkol studovat vývoj komety 46P/Wirtanen mj. během přistání na různých místech jejího povrchu a sledovat změny při interakci se slunečním zářením. Comet Hopper bude studovat kometu prováděním detailních měření přímo na vybraných místech povrchu, z měnící se vzdálenosti od povrchu a rovněž uvnitř vnitřní kómy, která se bude vytvářet v době přibližování ke Slunci. Vnitřní kóma je jakási atmosféra komety, která má svůj původ v kometárním jádru – vzniká jeho odplyňováním v podobě výtrysků těkavých látek.
„Budeme dlouhodobě studovat povrch jádra komety; to je něco, co doposud nebylo nikdy realizováno,“ říká Joe Nuth (Goddard Space Flight Center, NASA), který se podílí na projektu sondy Comet Hopper. „Víme, že uvnitř komety existují těkavé látky (tj. molekuly, které se snadno vypařují za normální teploty). Chtěli bychom přistát na místech, která jsou relativně hladká a jsou vhodná jako úložiště těkavých látek.“
Kosmická sonda ponese vzájemně se doplňující přístroje, které budou studovat fyzikální a chemické složení jádra komety a okolní atmosféry (kómy). Komplex vědeckých přístrojů zahrnuje aparaturu jak pro dálkový průzkum, tak i pro průzkum přímo na povrchu komety (in situ). Jedná se například o mapovací kameru, infračervený spektrometr, hmotový spektrometr, panoramatickou kameru a teplotní čidlo.

[14] Comet Hopper v představě malíře
Bude japonský robot kráčet po Měsíci?
Skupina japonských inženýrů a techniků zahájila přípravu dvounohého humanoidního robota, uzpůsobeného k pohybu po povrchu Měsíce. „Rozhodli jsme se pro robota podobného člověku, protože to je pro nás velmi fascinující a stimulující,“ říká Hideo Sugimoto. „Vyrobíme atraktivního robota, který bude naše představy šířit ve vesmíru.“
Tým konstruktérů je součástí konsorcia šesti malých firem, nazvaného Astro-Technology SOHLA (Space Oriented Higashiosaka Leading Association), které má sídlo v prefektuře Osaka, v regionu Kansai na ostrově Honšú – nejdůležitějším ostrově Japonska.
Předpokládané obrovské vývojové náklady mohou způsobit potíže skupině odborníků, plánujících realizaci robota, avšak společnost je připravena se o to pokusit. Konstruktéři se domnívají, že projekt může podpořit japonský výrobní průmysl a ukázat tak veřejnosti, že i malé a střední společnosti mohou mít vysoké cíle a být schopné konkurence.
Japonsko je známo pro své pokročilé automatické výrobní technologie. Zdejší společnosti mohou využít své odborné znalosti k vývoji robota, který bude schopen fungovat na povrchu Měsíce, uvádí deník Daily Yomiuri.
V roce 2010 společnost Astro-Technology SOHLA úspěšně realizovala malou technologickou družici o hmotnosti 50 kg, která byla pojmenována Maido-1. Byla určena k ověření funkčnosti různých běžně dostupných konstrukčních prvků pro levné mikrodružice. Na heliosynchronní oběžnou dráhu kolem Země byla vypuštěna 23. 1. 2009 nosnou raketou HII-A. Daily Yomiuri informoval, že společnost předběžně pojmenovala robota vzhledem podobného člověku „Maido-kun“ – na počest úspěšné družice. Odhadovaná cena robota, jehož výška bude menší než průměrná výška člověka, je přibližně 1 miliarda jenů (asi 10,6 miliónu dolarů).
Japonská vláda a Japonská kosmická agentura JAXA jsou připraveny vyslat výzkumného robota na Měsíc v roce 2015 a společnost Astro-Technology SOHLA doufá, že jimi navrhovaný robot bude schopen absolvovat plánovanou misi a na povrchu Měsíce tak následovat Neila Armstronga a další americké astronauty. O tomto svém plánu informovali zástupci konsorcia 27. dubna 2010.
JAXA již dříve zvažovala vyslat dvounohého robota na Měsíc, avšak odborníci nakonec dospěli k názoru, že robot na kolečkách by se setkal s mnohem menším počtem technických problémů a byl by mnohem stabilnější při pohybu po povrchu Měsíce se spoustou prachu a tzv. regolitu včetně kamenů různých velikostí.
Mezitím NASA vyslala humanoidního robota nazvaného Robonaut R2 na Mezinárodní kosmickou stanici ISS, a to na palubě raketoplánu Discovery (let STS-133), jehož start se uskutečnil v únoru 2011. Tento obratný robot bude prvním člověku podobným robotem trvale přítomným na palubě kosmické stanice. Americký robot se skládá z hlavy a trupu se dvěma pažemi, je však bez nohou. Podobný robot by mohl v budoucnu řídit pojízdné laboratoře pro výzkum povrchu Měsíce, Marsu či jiných těles.
[15] Japonský humanoidní robot na povrchu Měsíce v představě umělce
Zdroje snímků:
[1] http://upload.wikimedia.org/wikipedia/commons/d/d6/Mars_Science_Laboratory_Sky_Crane.jpg
[2] http://marsprogram.jpl.nasa.gov/msl/images/msl20110519_PIA14156-br2.jpg
[3] http://lunarscience.arc.nasa.gov/images/272.jpg
[4] http://4.bp.blogspot.com/_b1AE8x4eLKI/SPiEdg0TgZI/AAAAAAAAE7s/jky4QXUN7qc/s1600-h/e10f95c6ec01.jpg
[5] http://infinitylabs.net/wp-content/uploads/2007/04/roverchina.jpg
[6] http://images.china.cn/attachement/bmp/site1007/20080424/001109b42f98097a37890d.bmp
[7] http://esamultimedia.esa.int/images/aurora/EXOMARS/Exomars.24.10.jpg
[8] http://upload.wikimedia.org/wikipedia/commons/2/20/MAX-C-Rover.jpg
[9] http://www.frc.ri.cmu.edu/projects/lri/scarab/images/p1160501.png
[10] http://www.frc.ri.cmu.edu/projects/lri/scarab/images/MK_rover/IMG_6206.JPG
[11] http://www.astro.cz/_data/images/news/2004/10/04/ERA-_tracking.jpg
[12] http://cache.gawker.com/assets/images/4/2010/01/time-ship.png
[13] http://upload.wikimedia.org/wikipedia/commons/7/70/TSSM-TandEM-Lander.jpg
[14] http://www.nasa.gov/centers/goddard/images/content/543815main_comet-hopper.jpg
[15] http://www.space.com/8340-japan-put-human-oid-moon-2015.html
Vyhledávání
Novinky
26.02.16
Robotika s Legem – jednoduchými kroky ke složitému cíli
Malé shrnutí postřehů po pěti letech od vzniku a zařazení do nabídky programů Robotika je název programu, který patří ke speciálním vzdělávacím pořadům hvězdárny a pravděpodobně jej už můžeme zařadit k oblíbeným stálicím naší nabídky. Program je určen především pro žáky vyšších ročníků základních škol a studenty škol středních.
15.11.13
Planetárium v Polus City Center
30.04.13
Prezentace výsledků projektu na Trenčianskom robotickom dni
Díky rozvoji přeshraniční spolupráce jsme byli k aktivní účasti pozváni organizátory 8. ročníku Trenčianského robotického dňa. Akce se účastnila také naše partnerská Hvězdárna v Partizánskom, a tak jsme i přes velké pracovní vytížení do Trenčína přijeli. Akce byla v mnoha ohledech poučná a inspirativní a nejen že jsme seznámili posluchače s novými vzdělávacími programy, ale hlavně oslovili žáky a studenty se zájmem o automatizaci a robotizaci.